研究背景
水凝膠作爲一種重要的智能材料,因其具有響應外部刺激而發生形狀和體積變化的特性而備受科學家的關注。然而,將功能、材質、形狀和尺寸不同的水凝膠單元進行粘合以制造智能材料和軟體機器人是一項具有挑戰性的任務。水凝膠由于其主要成分爲水而不具備固體表面的輪廓分明,因此難以進行粘合。此外,水凝膠發生體積和形狀變化時,往往會對粘合層造成破壞,使得傳統粘合劑難以滿足其可控組裝的需求。因此,如何設計一種可適應水凝膠形變並能夠實現可控組裝的粘合劑成爲了研究的難題,尤其是對于實現智能材料和軟體機器人的部件可拆卸、可重構、可編程的要求。
成果簡介
爲了解決這一問題,中國科學技術大學吳思教授等人聯合設計了一種基于可逆光交聯高分子的粘合劑,通過這種粘合劑實現了水凝膠的可控組裝和軟體機器人的功能控制。這種粘合劑利用了光交聯的特性,可以適應水凝膠的形變並實現可逆粘合,從而解決了傳統粘合劑無法解決的問題。這項研究成果發表在《Nature Chemistry》雜志上,題爲《Reconfiguring hydrogel assemblies using a photocontrolled metallopolymer adhesive》。通過這項研究,他們成功地實現了水凝膠組件的可重構結構和可重新編程功能,爲智能材料和軟體機器人的研究提供了全新的思路和方法。

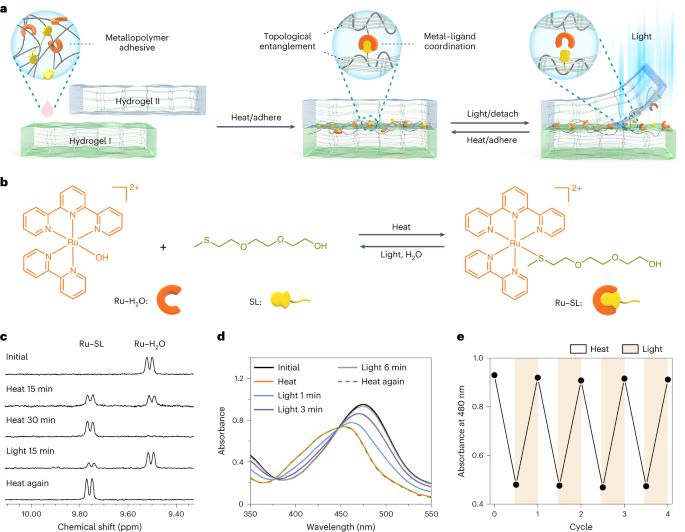
爲了證明可逆Ru-S配位的機制,作者首先合成了Ru絡合物(Ru-H2O和Ru-SL)和硫醚配體(SL)作爲模型化合物。通過1H核磁共振(NMR)光譜分析(圖1c),當Ru-H2O和SL混合物加熱至70℃,Ru-H2O的信號消失,而Ru-SL的新信號出現,表明SL與Ru形成了配位鍵。隨後,將Ru-SL溶液暴露于藍光下,大多數Ru-SL水解成Ru-H2O。再次加熱樣品後,Ru-SL再次形成,證明Ru-S配位是可逆的。此外,通過紫外-可見吸收光譜分析(圖1d),結果也支持了Ru-S配位的可逆性。最初,Ru-H2O和SL混合物的吸收峰值位于476nm處,加熱後吸收峰值移到452nm處,這結果與純Ru-SL相同。光照射後,吸收帶恢複到初始狀態,再次加熱後,吸收峰值再次移到452nm處。這些結果表明了Ru-S配位鍵的形成和解離可以循環多次,且是穩定且可逆的。這一系列實驗結果表明,金屬-配體配位是一種可行的可逆粘合機制,爲後續的水凝膠組裝提供了基礎。

爲了制備可逆粘合劑,作者合成了含有钌的聚合物(P-Ru)和含有硫醚基的聚合物(P-S)。這兩種聚合物在水中溶解,在70°C加熱時形成凝膠。通過1H核磁共振譜顯示,凝膠化是由于Ru-S配位交聯引起的,再因爲光誘導了Ru-S鍵的解離,所以用藍光照射P-Ru/P-S凝膠可誘導凝膠-溶膠發生轉變。 爲了證明P-Ru/P-S混合物可以作爲可逆粘合劑,作者將兩個P1凝膠粘合在一起。通過加熱將P-Ru/P-S溶膠置于凝膠之間,促使溶膠-凝膠轉變以實現粘合。光照誘導凝膠-溶膠轉變可使P1凝膠分離,分離的P1凝膠可通過再次加熱並添加P-Ru/P-S溶膠進行重新粘合。拉伸剪切測試表明,P-Ru/P-S粘合劑與P1凝膠的粘附強度爲1.18kPa。光照誘導的溶膠-凝膠轉變使粘附強度降至幾乎爲零,可實現P1凝膠的分離。重新粘合的P1凝膠與初始樣品具有相似的粘附強度。掃描電子顯微鏡觀察發現,粘合和重新粘合的樣品在P1和P-Ru/P-S凝膠接觸點形成了相互滲透的網絡結構。光照後,P-Ru/P-S網絡消失,導致粘合劑的分離。這些結果表明,通過Ru-S配位交聯,P-Ru/P-S混合物可作爲可逆粘合劑,實現了水凝膠的可控組裝和分離。
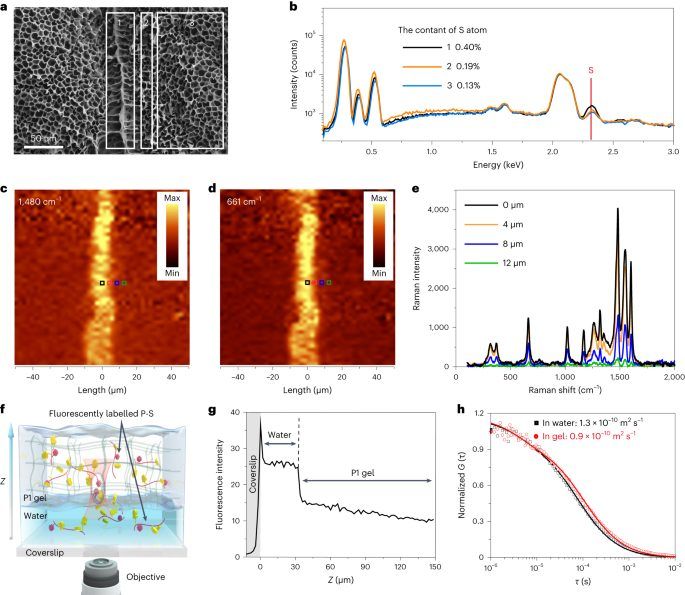
爲了了解P1和P-Ru/P-S之間的交界處結構,作者采用了能量色散光譜(EDS)的掃描電子顯微鏡。通過測量P-S和P-Ru中的硫和钌的信號,作者展示了它們在不同區域的分布情況。EDS數據顯示了在P-Ru/P-S豐富區域、交界區域和P1豐富區域的硫含量分別爲0.40%、0.19%和0.13%。這表明P-S滲透到了P1中。拉曼映射技術進一步證實了P-Ru/P-S的存在,並顯示出P-Ru/P-S與P1相互滲透。爲了進一步理解相互滲透的機制,作者合成了熒光標記的P-S並使用熒光相關光譜(FCS)研究了其擴散。結果顯示,熒光標記的P-S可以從水相擴散到P1凝膠中,盡管P1凝膠的網絡結構稍微減緩了擴散速度。這些結果揭示了P-Ru/P-S粘合劑在P1凝膠交界處的分布和滲透行爲,爲進一步理解其粘合機制提供了重要線索礎。
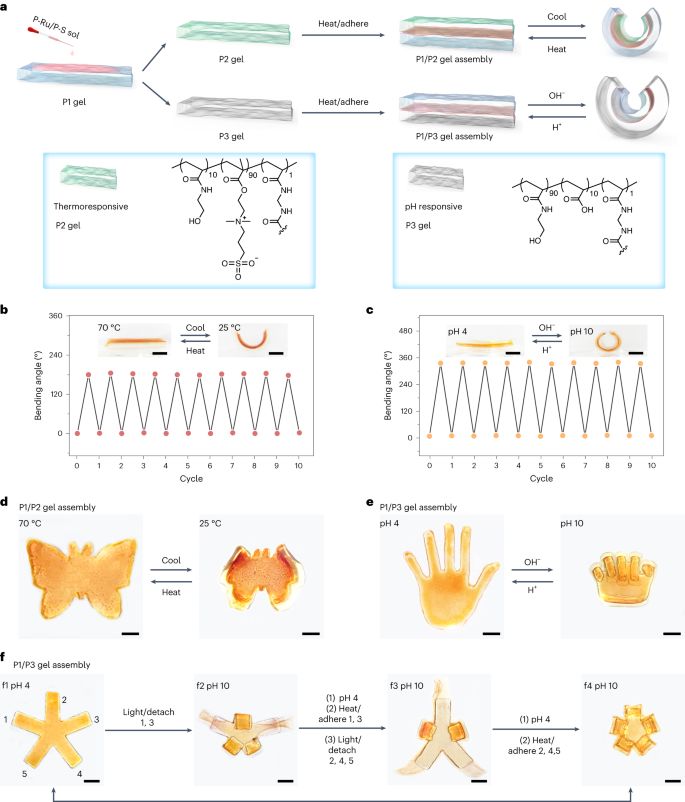
在本研究中,爲了開發具有溫度和pH響應性的水凝膠致動器,研究人員使用可逆粘合劑P-Ru/P-S組裝了水凝膠器件並探究了其性能。首先,研究人員制備了P-Ru/P-S粘合劑,並證明了其對溫度和pH的耐受性。經過不同溫度和pH值處理後,P-Ru/P-S粘合的P1凝膠的粘附強度沒有發生變化,這爲後續的實驗提供了基礎。接著,研究人員設計了三種類型的水凝膠單元:惰性的P1凝膠、溫度響應的P2凝膠和pH響應的P3凝膠。使用P-Ru/P-S粘合劑,他們將這些水凝膠單元組裝成了P1/P2和P1/P3凝膠組件。P1/P2凝膠組件在溫度變化下實現了可逆的彎曲和展開,而P1/P3凝膠組件在pH變化下觸發了可逆的形狀變化。 團隊通過進一步實驗表明,使用P-Ru/P-S粘合劑粘合的水凝膠組件表現出強大的粘附性和形狀可逆性。這一特性歸因于多種因素的合作:首先,Ru–S配位和聚合物鏈纏繞相互配合形成了牢固的粘合;其次,P-Ru/P-S粘合劑的粘附不受pH和溫度影響,表現出穩定的粘合性;最後,P-Ru/P-S粘合劑作爲一種水凝膠,能夠在水分子的水合和脫水過程中改變形狀,但同時保持其整體網絡結構。通過粘合P1/P3凝膠組件制備的五臂凝膠組件的實驗進一步驗證了P-Ru/P-S粘合劑的強粘附性和可逆性。
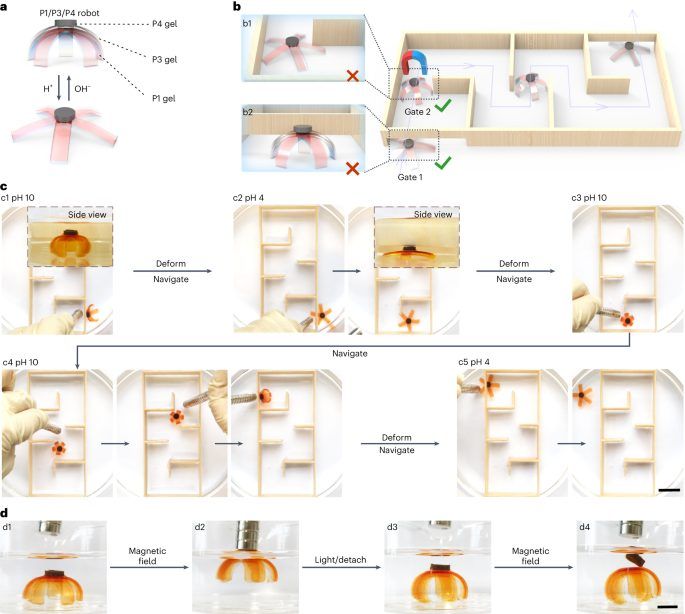
爲了設計具有複雜和異質結構的軟體機器人,並探索其在迷宮導航中的應用,作者利用P-Ru/P-S粘合劑將非響應性P1凝膠、pH響應性P3凝膠和含磁性顆粒的P4凝膠粘合在一起(圖5a)。P4凝膠的磁性使其能夠在磁場中移動,而P1和P3單元則可以隨著P4單元的運動。作者證明了P1/P3/P4機器人可以在pH和磁場的調節下穿越迷宮(圖5b、c),這爲軟體機器人在複雜環境中的應用提供了新的可能性。特別是,pH的調節能夠改變機器人的形態,使其能夠通過不同尺寸的通道。此外,作者通過光照分離P1/P3凝膠和P4凝膠,驗證了機器人的可重構性(圖5d)。這意味著機器人的各個組成部分可以靈活地重組和重用,爲其在各種應用場景中的定制提供了便利。
總結展望
本研究展示了利用金屬聚合物粘合劑將水凝膠單元可逆粘合成複雜、多功能的水凝膠組裝體,從而爲設計具有多組分、可重構、可編程功能的智能材料和軟體機器人提供了新思路。通過光控制的Ru-S配位和聚合物鏈纏結相結合的獨特設計,作者成功實現了粘合劑的強度和可逆性,與傳統的膠粘劑設計不同。這一研究啓示我們,可逆粘合技術爲制備智能材料和軟體機器人提供了一種全新的方法,未來有望應用于響應材料、生物醫學和機器人領域,推動這些領域的發展。
文獻信息
Liu, J., Huang, YS., Liu, Y. et al. Reconfiguring hydrogel assemblies using a photocontrolled metallopolymer adhesive for multiple customized functions. Nat. Chem. (2024). 10.1038/s41557-024-01476-2
